
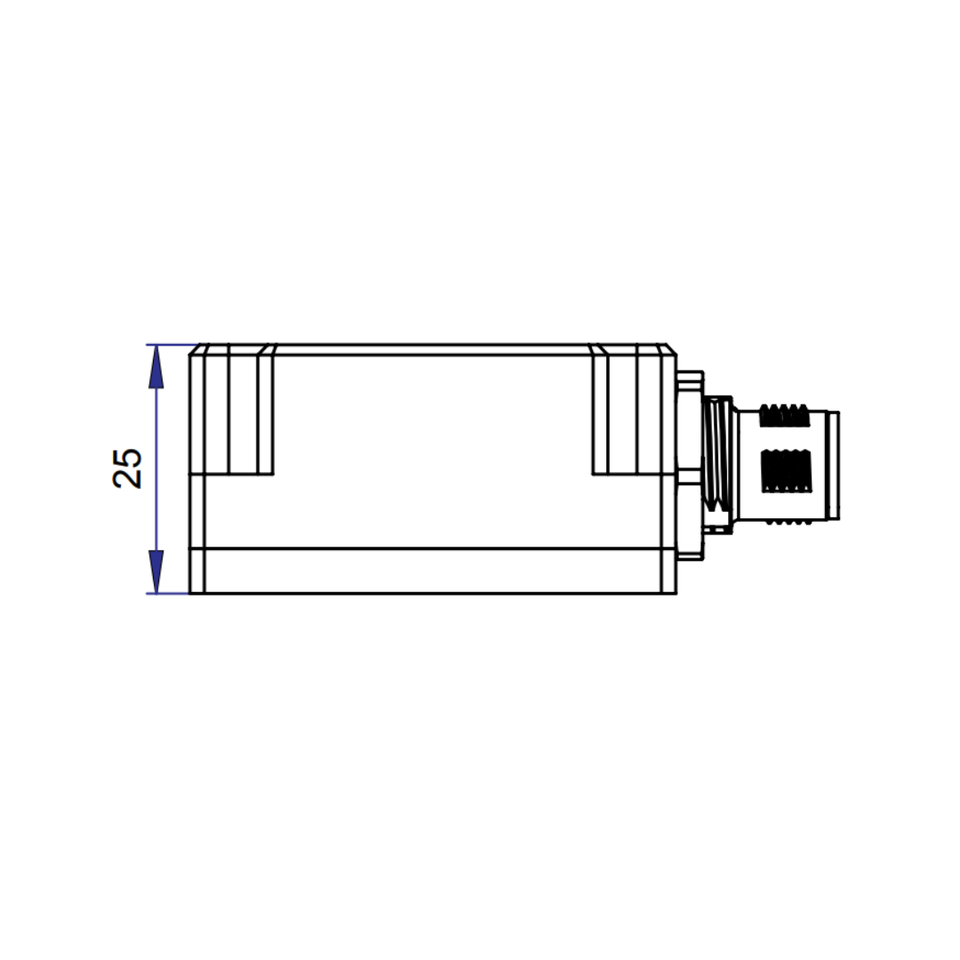
LPMS-CANAL3 IMU/AHRS de 9 Ejes con Interfaz CAN y Carcasa Impermeable
Sin reseñas






Atributos
Unidad de medición inercialTipo
Datos sin calibrar y calibrados, Ángulo de Euler, Cuaternión, LinealSalida
9 ejesEje
PuedeInterfaz
Sensor IMUTeoría
Cable con conectorTerminales
Tipo de montaje:Estándar
Número de pieza del fabricante:LPMS-CANAL3
Marca:LP-RESEARCH
Aplicación:Control de equilibrio del manipulador, control del brazo robótico
Rango de detección:Rollo: ±180°; Inclinación: ±90°Yaw: ±180°
Descripción:IMU / AHRS de 9 ejes con interfaz CAN
Lugar del origen:Guangdong, China
Serie:Serie LPMS-AL3
Descripción:IMU / AHRS de 9 ejes con giroscopios de ruido ultrabajo
Potencia nominal:<135 mW a 5 V
-Tensión de alimentación:5 V ~ 18 V CC
Categoría:Sensores IMU
Información adicional:Salida de señal CAN
Código de Fecha de Fabricación:Últimos

Características clave
Tipo
Unidad de medición inercial
Salida
Datos sin calibrar y calibrados, Ángulo de Euler, Cuaternión, Lineal
Eje
9 ejes
Interfaz
Puede
Teoría
Sensor IMU
Terminales
Cable con conector
Aplicación
Control de equilibrio del manipulador, control del brazo robótico
Tipo de montaje
Estándar
Número de pieza del fabricante
LPMS-CANAL3
Marca
LP-RESEARCH
Rango de detección
Rollo: ±180°; Inclinación: ±90°Yaw: ±180°
Descripción
IMU / AHRS de 9 ejes con interfaz CAN
Lugar del origen
Guangdong, China
Serie
Serie LPMS-AL3
Descripción
IMU / AHRS de 9 ejes con giroscopios de ruido ultrabajo
Potencia nominal
<135 mW a 5 V
-Tensión de alimentación
5 V ~ 18 V CC
Categoría
Sensores IMU
Información adicional
Salida de señal CAN
Código de Fecha de Fabricación
Últimos
Empaque y entrega
Unidades de venta
Artículo individual
Descripción de producto del proveedor
Advertencia/Descargo de responsabilidad
Advertencia de la Proposición 65 de California para consumidoresVer más
Cantidad mínima de compra: 1 unidad
EUR 301.00
Variantes
ElegirPAQUETE/cubierta: caja LP
caja LP
Código de fecha de fabricación
2025+
Envío
Tarifa de envío y fecha de entrega por definir. Chatea con el proveedor para confirmar los detalles.
Protección de pedidos de Alibaba.com

Pagos seguros



Todos tus pagos realizados en Alibaba.com están protegidos por cifrado SSL y protocolos de protección de datos PCI DSS

Garantía de devolución de dinero
Solicita un reembolso si tu pedido no se envía, no llega o hay defectos en el producto
Solo los pedidos realizados y pagados a través de Alibaba.com reciben la protección gratuita de
