

Atributos
StandardTipo de montaje
LatestCódigo de fecha de fabricación
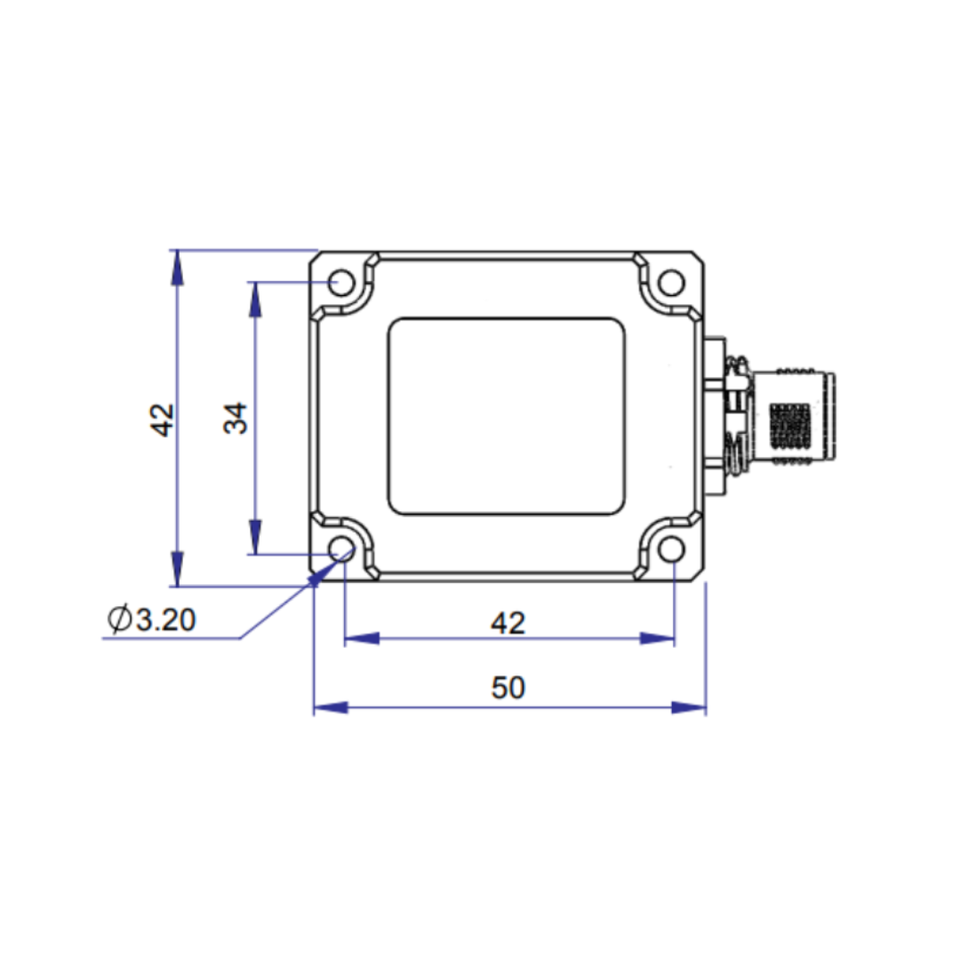
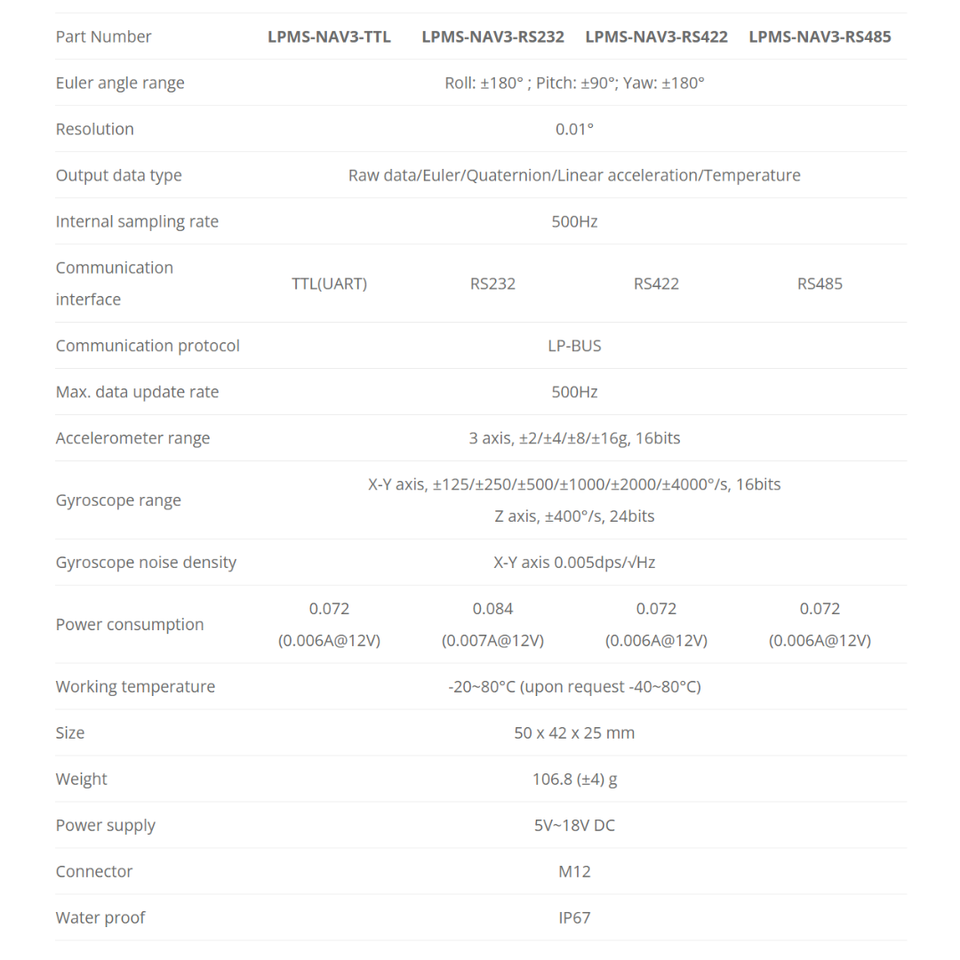
LPMS-NAV3-RS422Número de Modelo
Unidad de medición inercialTipo
LP-RESEARCHMarca
AGV/AMR naviigation, Automatic dead reckoning,SLAMAplicación
Rango de detección:Roll: ±180°; Pitch: ±90°; Yaw: ±180°
Descripción:6-axis industrial IMU RS422 interface AGV
Lugar del origen:Guangdong, China
Serie:LPMS-NAV3 series
Teoría:IMU sensor
Salida:Raw&Calibrate data/Euler angle/Quaternion/Linear
Descripción:IMU with High-precision Heading Measurment
Interfaz:RS-422
Potencia nominal:0.072 (0.006A@12V)
-Tensión de alimentación:5V ~ 36V DC
Eje:6-Axis
Terminales:Cable con conector
LPMS-NAV3-RS422:RS422 signal output
Category:IMU Sensors
Unidades de venta:Artículo individual